加速度信号の絶対座標系への座標変換(単位クォータニオンの利用)
座標変換
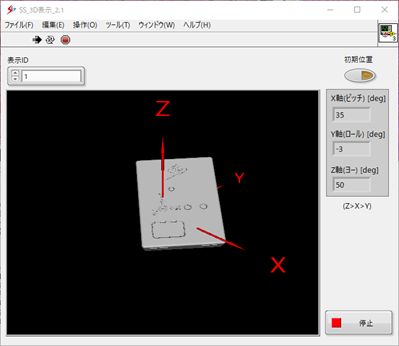
モーションセンサ(以後,MSと呼ぶ)が計測する加速度信号,角速度信号は,MSに固定されたローカル座標系の信号です.例えば,センサを水平に置くと(Z軸を鉛直方向にすると),センサのZ方向にだけ1Gの加速度が計測されます.その状態から,センサをゆっくり傾けると,センサには重力加速度だけが検出されますが,XYZ各軸に重力加速度の成分が検出されます.このように当たり前ですが,センサはセンサに固定されたセンサ(ローカル)座標系の情報を計測します.
一方,絶対座標系で加速度を観察すると,重力加速度は常に鉛直下向きです.運動の解析では絶対座標系の加速度情報が必要とされることも多々あり,そのためにはセンサ(ローカル)座標系の加速度を絶対座標計へ座標変換する必要があります.
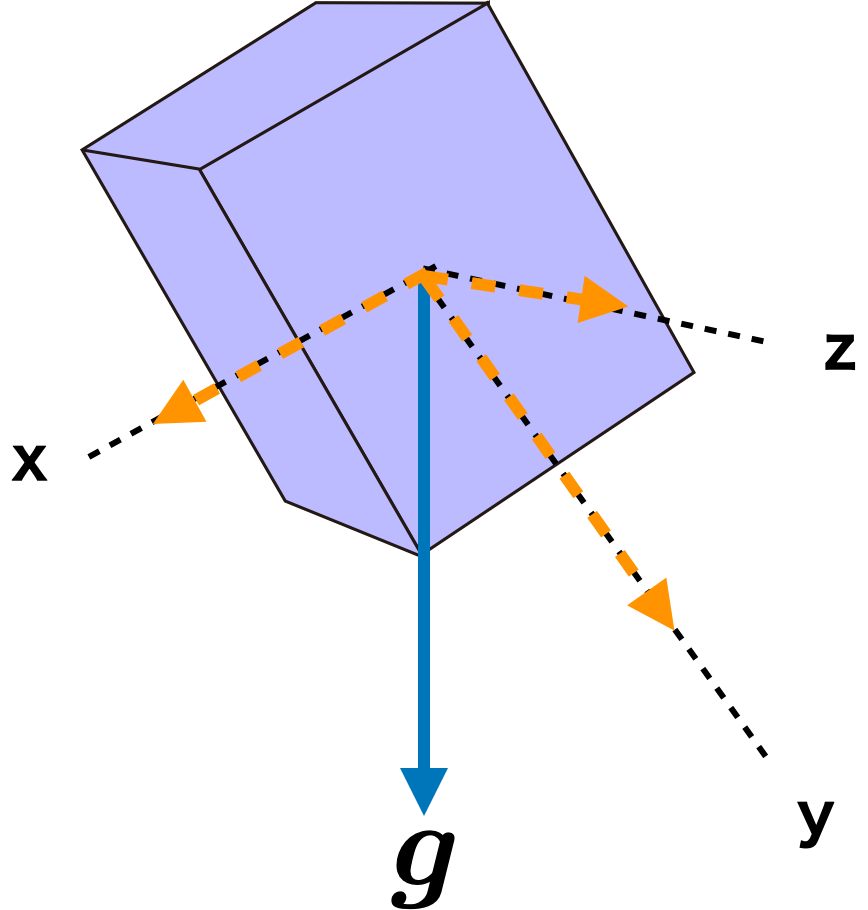
図1:加速度信号(重力加速度)のセンサ座標系への分配