加速度センサの基礎
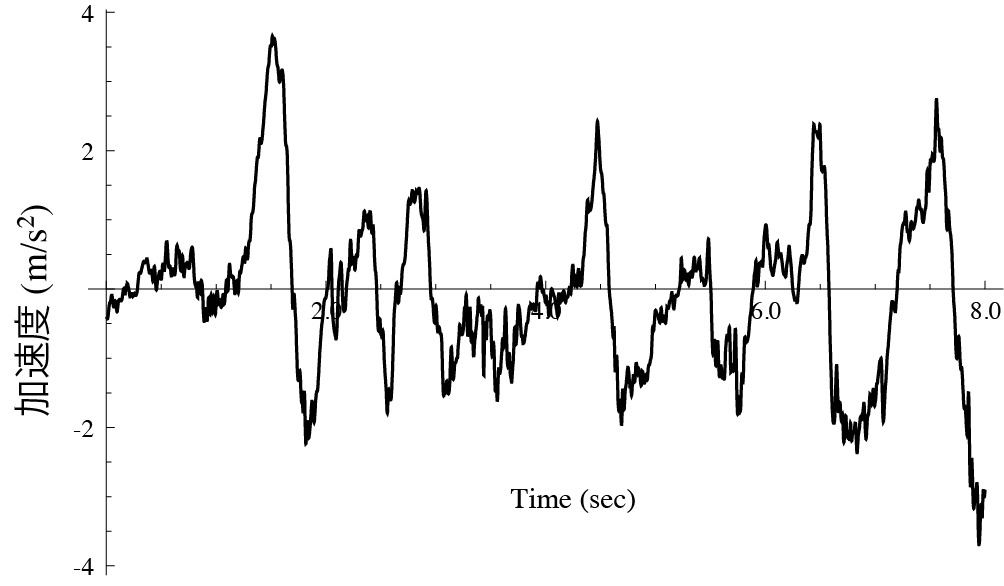
加速度波形例
モーションセンサを構成する加速度センサについて解説します.自由に運動している物体に加速度センサを装着して運動を計測した例が,上の図の加速度です.同じ加速度信号でも,この信号をどの座標系から観察した加速度と捉えるかで,この信号の意味が変わってきます.
では,加速度とは何でしょう?速度は,位置の変化率,すなわち単位時間あたりにどの程度位置(変位)が変化しているか観察した量が速度です.当たり前ですが位置がどんどんずれると速度を持つことになり,位置が変わらないと速度がゼロです.感覚的にもこの物理量はわかりやすいと思います.加速度は,さらにこの速度の単位時間あたりの変化率を指します.同じように速度が変化すると(増加したり,減少したりすると),加速度が生じます.
速度の単位は単位時間あたりの位置の変化量ですから[m/s]です.ですから,加速度の単位はさらにもう一度時間で割るので[m/s^2]です.しかし,これは一般的な科学で用いられる SI単位で,加速度センサは通常重力加速度[g]を単位としています.つまり,地球が物体を引張る引力を基準にした加速度で,1[g]はおおよそ9.8[m/s^2]です.重力加速度は実際には場所によって異なってしまいますが,ほとんどセンサの誤差範囲内です.国土地理院のデータによると東京の重力加速度は9.798[m/s^2]ぐらいです.北海道ですと9.805[m/s^2]です.地域によって結構違いがありますが,加速度センサの値に9.8倍した値を加速度として計算して問題ないでしょう.
実は加速度センサは力センサである
加速度センサの内部は各社で異なりますが,多くのタイプのセンサでは実は力センサが内蔵されていると考えてください.実際のセンサの内部構造と異なりますが,歪みゲージ型の加速度センサと同様に,梁に作用する歪みを測っていると考えるとわかりやすいです.
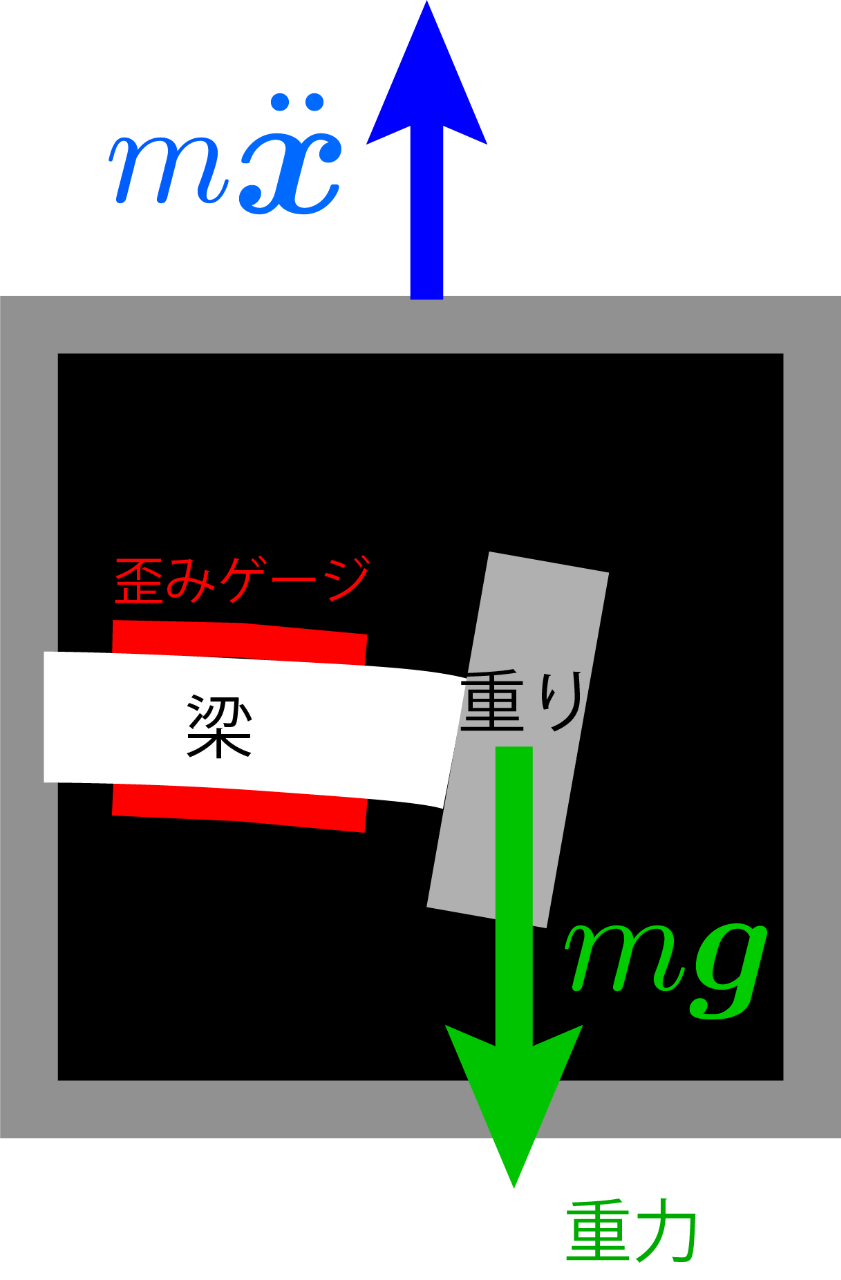
図に示したように加速度センサには梁とその先に重りがついていると考えてください.梁には歪みゲージが貼ってあります.これと同等な構造が一般的な加速度センサに入っていると考えてください.加速度センサはこの梁のたわみを測っています.すると,このたわみ変形は,重りに作用する力によって変化します.つまり,静止していても重力を含んだ力を計測しています.この点にご注意ください.
加速度センサに作用している力を中の重りの質量mで割ると,加速度が計算されます.この値を加速度センサが算出していると考えてください.ですから加速度センサは実は力センサなのです.力センサなので,動いていないのに重力加速度も測定しています.センサを静止した状態である向きでキャリブレーションして,この重力加速度をリセットしたつもりでも,向きが変われば,他の軸にこの重力加速度は含まれています.重力加速度が,必ず含まれていることにご注意ください.
加速度信号の符号(注意点)
加速度センサを使っているときに混乱するもう一つのことが,信号の向きです.モーションセンサを静止して置くと,重力は下向きに引張ります.すなわち力が鉛直下方に作用します.たとえば,スポーツセンシング社の加速度センサは軸を上向きに設定すると,重力加速度によって信号は負の信号を出力します.図のように下側にたわんだときが負の信号です.
また,センサを上側に並進運動させて加速すると,上側の力が作用するのですが,同様に下側にたわむので,信号は負の信号を出力します.直感と異なるかもしれないのですが,一般にはセンサは重力方向に合わせているので,このような仕様になっていることにご注意ください.
つまり加速度センサは作用している力や加速度と反対向きの信号を出力しています.
これは,物理的には間違った出力なのですが,センサのチップ自体の仕様です.ほとんどのメーカーのセンサチップがそのような仕様となっています.何も運動をしていないときには重力加速度しか作用しませんが,センサを下向きにしたときに+1Gを指すのが,直感的と考えたからなのかもしれませんが,物理的には反対ですので,物理計算などを行うときには,加速度の符号を反対にしてご利用ください.
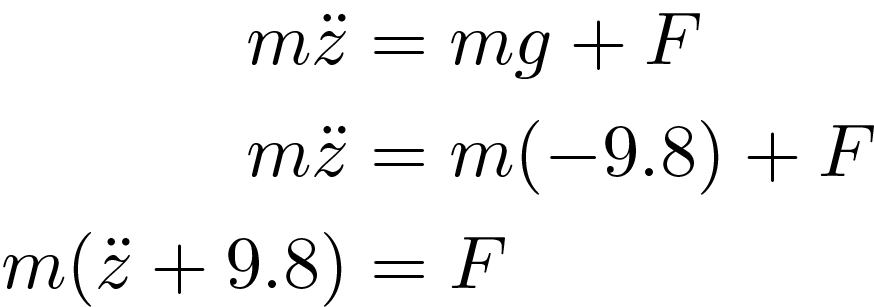
このことを式で考えてみましょう.上の式はZ軸に関する運動方程式です.上向きが正です.zについている2つのドットが変位Zの二階微分,すなわちzツードットはz方向の加速度です.mはセンサの重りの質量,g=-9.8は重力加速度ですが,いまz軸の上向きを正としていて,重力は下向きに作用するのでマイナスの9.8です.Fはセンサに作用する力で,上向きにセンサを押している状態を想像してください.すると先ほどのセンサの図のようなたわんでいる状態になります.しかし,先ほども説明したようにセンサは反対向きの加速度を出力するので,
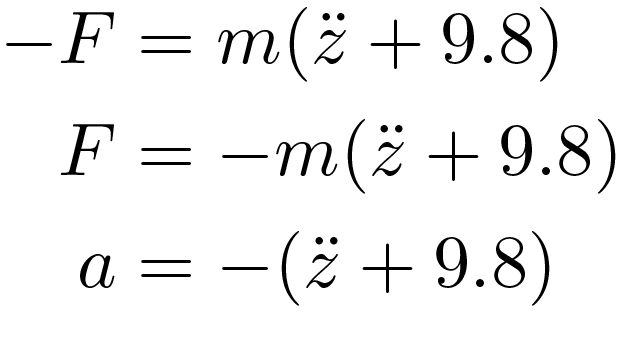
の式aの加速度を出力します.運動方程式を解くときは(力を算出するときは)センサの信号の向きを逆にしてください.
さて,このような向きの注意が必要ですが,加速度センサには少し都合の良いことと悪いことが含まれています.
まず,都合悪いこと,加速度センサの信号から,「運動による加速度と重力加速度は分離できません」.
次に,都合の良いこと,加速度センサは運動方程式を解くのに向いています.すなわち,センサを装着している「物体の力を算出する」ことが簡単に行え,便利です.ただし物体の質量の情報は必要です.なぜなら,重力加速度と運動による加速度を分離できないのですが,運動方程式を用いて力Fを算出するときには,上の式を見るとわかりますが,分離されていないので,まとめて計測してくれていますので,重力加速度の向きなどを考慮する必要がありません.センサの向きが変わるとき,z軸だけでなく,いろいろな向きに加速度信号が含まれますので.ただし,キャリブレーションで全ての信号をゼロにリセットしたときには,その方向(キャリブレーション時の鉛直方向だけ)に重力加速度(-9.8)を足してあげてください.
DSPを搭載しセンサ内部で柔軟な演算を行える新機軸の無線センサ

DSPワイヤレス9軸モーションセンサ
スタジオで計測いただくことができます
約100㎡(10m x 10m)のスペースがある計測スタジオをレンタルいただく事で、DSP9軸ワイヤレスモーションセンサ等を使用して運動計測、身体計測を行うことができます。

福岡計測スタジオ
お問い合わせ
製品についてのご質問などお気軽にお問い合わせ下さい。

製品に関するスポーツセンシング社へのお問合せ