BPAT HeartRate
・心拍センサ―+iPadで複数人の心拍数をリアルタイムに表示&記録する「BPAT HeartRate(ビーパット・ハートレート)」
・Ver2.2.0:Verity Senseに内蔵されているメモリへ記録する機能(心拍、加速度)を実装し、幅広い競技でのご活用に対応!(2025.09.25)
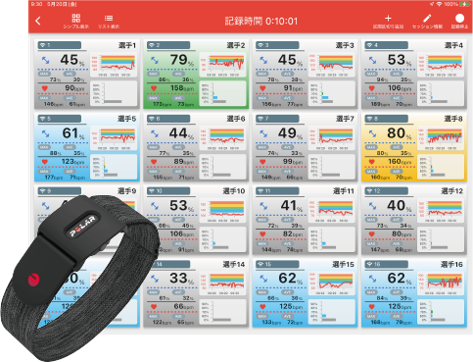
BPAT HeartRate(ビーパット・ハートレート)では、複数の選手の心拍数の変動をリアルタイムにiPadで確認できます。
必要なのは心拍センサ―とiPadだけというお手軽なソリューション。
最大心拍数に対する心拍ゾーンごとに選手の表示の色が変わるので、現在の負荷の状況が一目でわかります。リアルタイムのモニタリングでは、複数選手を一覧で見ることも、個人別に変動の詳細を見ることも可能です。
練習中や試合中の心拍数を確認し、自動算出される"eTRIMP"などを把握することでロードマネジメント(負荷管理)に役立てていただけます。効果的なトレーニング計画の策定、パフォーマンス向上の支援などにもご活用ください。
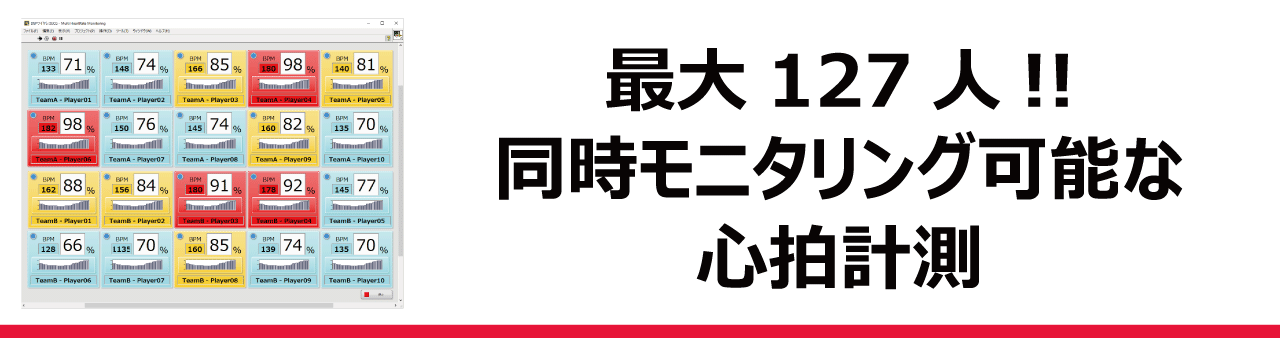
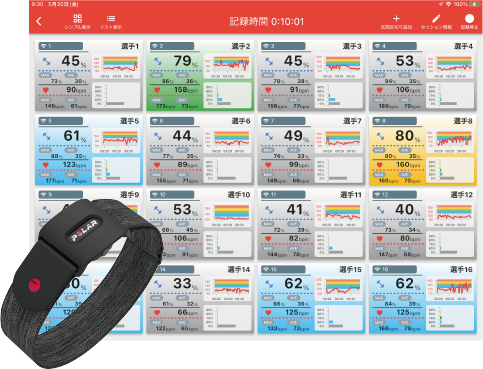
複数人を同時にリアルタイム・モニタリング

BPAT HeartRate - グループ表示画面
複数人から無線で飛んでくる心拍データは、BPAT HeartRateであらかじめ設定された振り分けに沿って、自動的に集約されます。
最大心拍数を設定しておくことにより、ゾーン表示がカラフルに、かつ、リアルタイムに行われます。
心肺の負荷状況を確認することで、選手本人にとっても、指導者/トレーナーにとっても、安全で安心な環境下でトレーニングやゲームを行うことが可能となります。
屋内競技では、大画面へiPadアプリケーションの出力し、選手もコーチもリアルタイムに見ながらトレーニングを行われているケースが非常に増えています!
(大画面への出力には、HDMIケーブルを接続できるアダプター、または、Apple TV にて簡単にミラーリング出力を行うことができます)
複数人同時モニタリングは、最大8 x 8 の64名まで可能に!!(ver2.2.0~)
Polar社センサーを持っていれば、すぐに始められます。モニタリングだけであれば無料!!
BPAT HeartRateは、Polar社製の心拍数センサー「Verity Sense」「H10」に対応しています。
体育館サイズのフィールドで、選手全員を問題なく計測し、データ受信できる無線の距離性能は、他には類を見ない有用性をもった心拍センサーです。
標準のベルトは伸縮性があり、強力なLEDで収集される信号は、上腕や下腿でも脈拍数の計測が可能です。
様々な競技での実績もあり、安心して使用することができるセンサーです。
<複数人同時モニタリングだけであれば無料で始められます>
上記のセンサーをお持ちの場合、複数人同時モニタリングは無料で始めることができます。
14日間分のデータは、アプリケーション内に保存されます。
(永続的なデータ保存、クラウドへのアップロードは、別途ライセンスが必要となります)

待望の内蔵メモリ保存機能 ~ 無線が届かない環境下での負荷データ記録
内蔵メモリへの記録+リアルタイムモニタリング
内部負荷と外部負荷
複数人同時制御
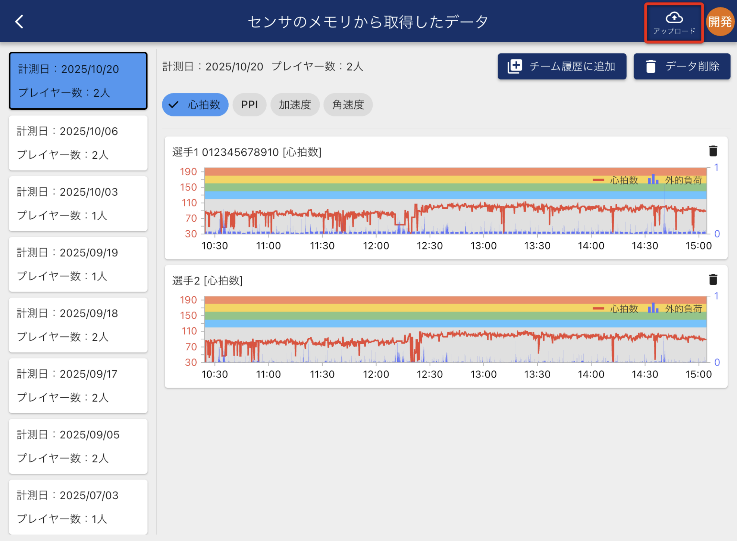
Polar社のVerity Sense には、本体内部にメモリが搭載されています。心拍数、加速度センサーデータを、BPAT HeartRateアプリケーションから内蔵メモリへの記録をコントロールできるようになりました。
サッカーやラグビーなどのコート面積が広い競技の他、水泳や陸上の長距離など、無線によるリアルタイムモニタリングが活用できない競技でも、データを取得できるようになります。また、観客が入ってる試合などの環境下でも、有用なデータを確実に取得できるようになります。
尚、加速度センサーデータは、メモリ保存機能のみで得られるデータです。
内部負荷としての心拍数データ、外部負荷としての3軸加速度データ。Verity Sense の小さな本体一つで、あらゆるスポーツに重要なデータを取得することが可能になりました。
3軸加速度データは合成加速度の演算も行われ、身体全体の外的負荷の推移が分かりやすい表示を行っています。
プロライセンスでは、3軸加速度のrawデータを取得可能です。また、3軸角速度の波形も、設定により取得可能です。
BPAT HeartRateの大きな特徴は、複数人(チーム)の同時コントロールです。Ver2.2.0のアプリケーションでは、複数人同時にVerity Senseの内蔵メモリ記録をコントロールすることが出来るようになりました。
区間分析機能(セッションと区間)

スポーツの映像分析において、"タギング"の重要性を理解しているスポーツセンシングでは、心拍計測データの区間分けが重要であると考えます。
例えば、あるトレーニング内容だけの結果を確認したいことがあるかもしれません。
また、そのトレーニングメニューをシーズンの前半と後半で比較したくなることがるかもしれません。
そこで、BPAT HeartRateでは、リアルタイムモニタリング中に、区間分けのイベントマーカーを記録することができるようになっています。
もちろん測定後、保存されたデータに対して、さらにセッションと区間を設定することもできます。
主な機能と特徴
チームスポーツでリアルタイムで可視化
個別データ詳細表示
区間分割機能
あらゆる競技において、トレーニング中でも、ゲーム(試合)中でも、有酸素能力の状態や緊張等のメンタル状態を把握できることはとても需要です。
心拍数をモニタリングし続けることで見えてくる、新たな知見獲得を支援します。
・ウォーミングアップは十分に行えているか?
・想定している強度でトレーニングできているのか?
・休憩時に心拍数は回復しているか?
一括モニタリング表示画面において、個々の選手の領域をクリックすれば、測定時間中全体の変動を見ることが可能です。
表示はゾーンニングされており、トレーニングや試合を、どのような強度でこなしたか。
すぐに把握することが可能です。
計測された時間(セッション)内を、区間に分割することができます。
例えば、ウォーミングアップ、基礎トレーニング、戦術練習など、トレーニング内容ごとに区間を分けたり。
実際に試合を想定した練習の場合、試合と同様の強度でトレーニングを行えているかどうか。
様々な観点で、区間分割しか結果を確認することは有用です。
グループメンバー管理
主観評価の入力機能とACWR
負荷管理支援
アプリケーションに登録されたメンバーは、タグを用いて、グループに分けた管理することが可能です。
例)
・AチームとBチーム、
・フォワードとディフェンス
・ケガ(リハビリ中)
一覧で確認したいグループを複数作成し、効率的なチーム管理を行っていくことができます。
各個人の各測定データ(セッションデータ)に対して、RPE(Rate of Perceived Exertions、主観的運動強度)を入力することができます。
区間分割機能とRPE値を併せれば、sRPE(セッションRPE)を算出することができます。
負荷を管理し、コントロールしながらシーズンのトレーニングを調整していくことは重要です。
BPAT HeartRateは、負荷の管理が容易になるよう、設計を行いました。
CLOUDライセンスの場合、ACWR(Acute Chronic Workload Ratio)を算出し、負荷管理を行うことができます。
得られた心拍数からは選手ごとに各Zoneごとの経過時間がリアルタイムに更新されます。
また、各Zoneごとの数値から、eTRIMPを自動的に算出されます。
区間分析機能と組みあわさることで、各セッションや区間ごとのZone分布、eTRIMPを算出されます。
トレーニング/練習内容の妥当性検証等にもお使いいただいております。
対応センサー
- Polar Verity Sense
- Polar H10 N (※ 内部メモリ記録 不可)
ギャラリー
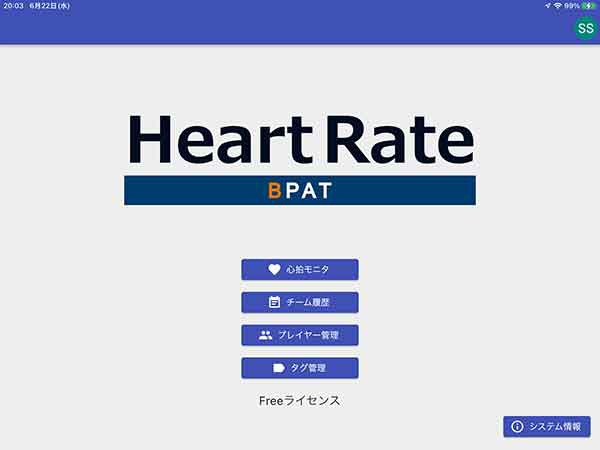
トップ画面

複数人モニタリング ~ 16Player表示
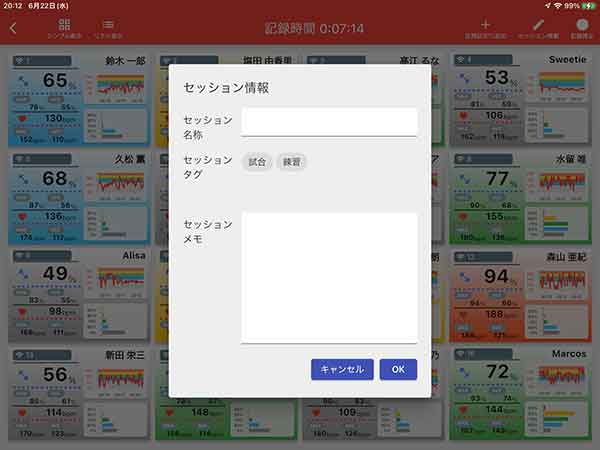
セッション / タグ入力 / コメント

区間の個人詳細

複数人モニタリング ~ 詳細表示

カレンダー / 履歴管理 / タグフィルタリング

複数人モニタリング ~ 大画面用シンプル表示
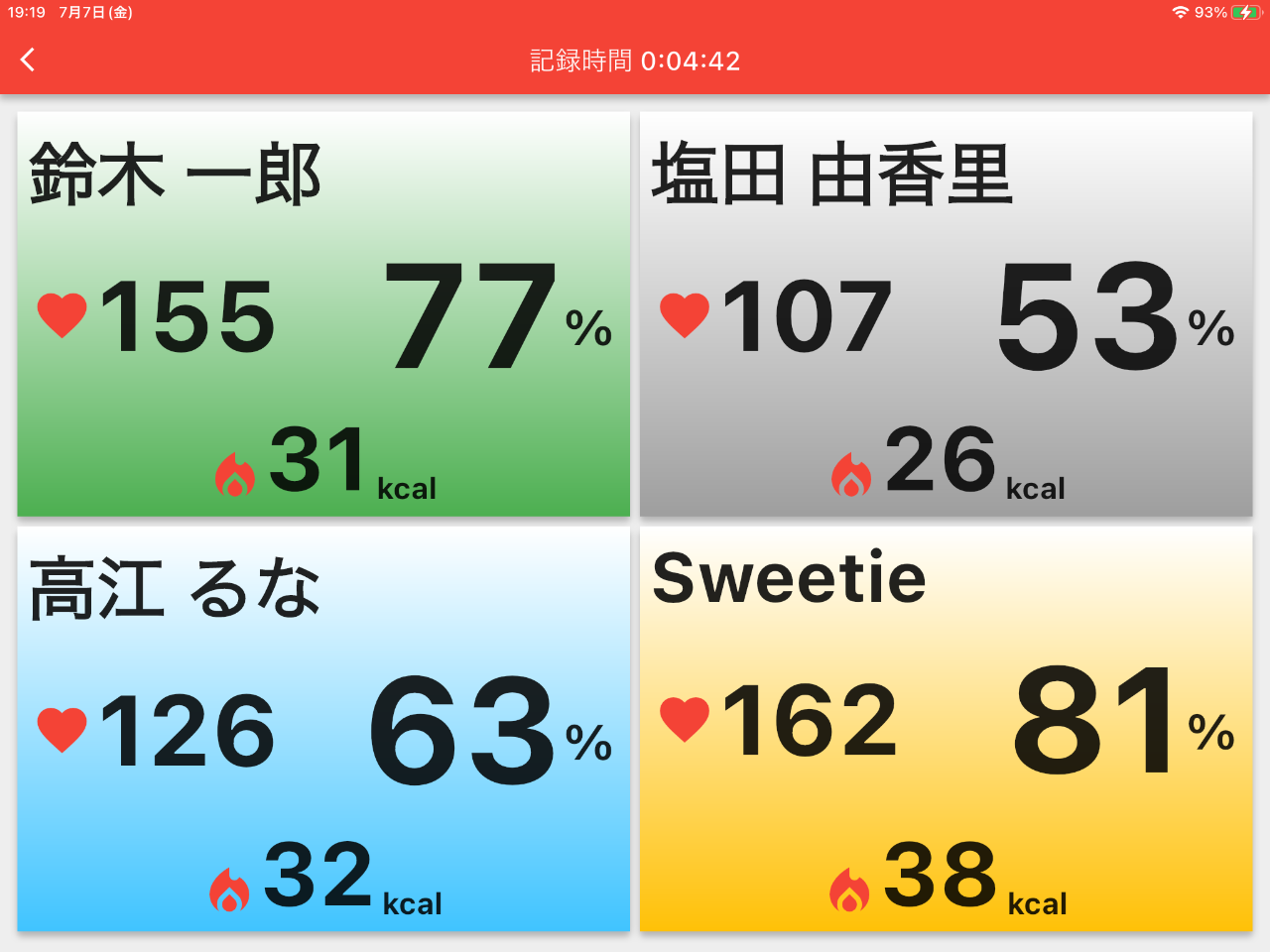
複数人モニタリング ~ 大画面用シンプル表示(4人)
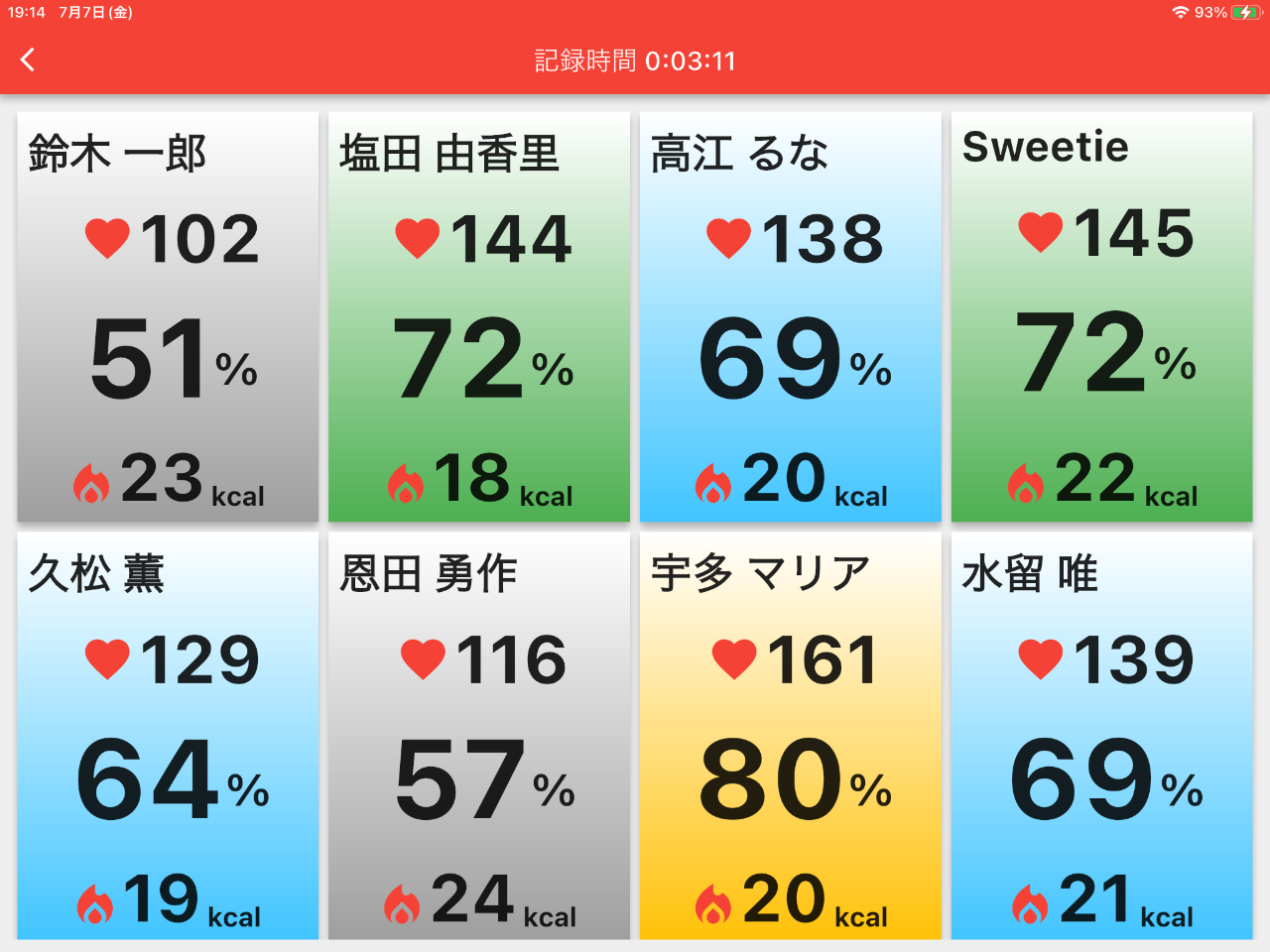
複数人モニタリング ~ 大画面用シンプル表示(8人)

区間のチーム集計